
스텝 1. 프로젝트 시작 전 > 1. 이미지 수집 계획 설계하기 > c. 주어진 정면 오버랩의 이미지 비율 계산
주어진 UAV/비행기 속도에 따른 전면 오버랩을 얻기 위한 이미지 촬영 비율은, GSD와 카메라를 사용합니다.(픽셀 해상도)
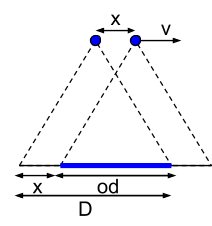
[그림1]
- D = 비행 방향으로 한 개의 이미지에 대한 접지 피복 거리[m]
- Overlap = 두 이미지 사이의 원하는 전면 오버랩 퍼센테이지
- od = 두 이미지 사이의 오버랩 거리[m]
- x = 두 카메라 사이의 거리[m]
- v = 비행 속도[m/s]
- t = 두 이미지 사이의 경과 시간 (이미지 비율)[s]
- 그림 1을 통해, 다음의 식을 검색할 수 있습니다.
- 식 (1)과 (4)를 (2)에 결합
- od = overlap * D (1)
- x = D - od (2)
- t = x / v (3)
- 두 가지의 경우가 가능합니다.
- 비행방향을 향한 수직 센서 폭(길이 치수)에 따른 카메라 배향(일반적인 경우)
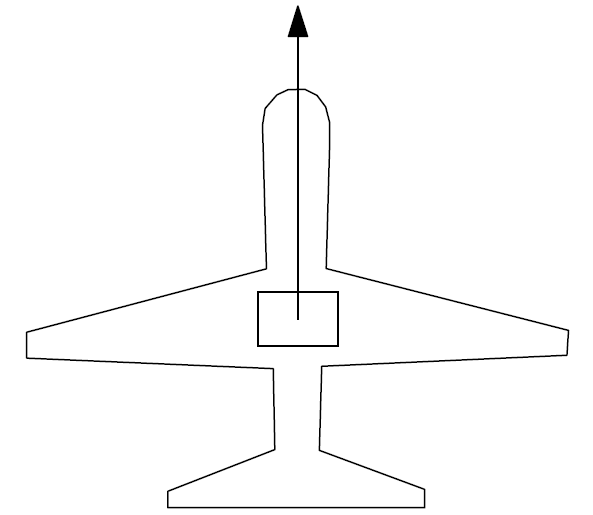
- [그림 2] 비행 방향에 수직으로 배치 된 센서 폭
- D = Dh = (imH * GSD) / 100 (4)
-
- 위치 :
- imH = 이미지 높이[Pixel]
- GSD = 원하는 GSD [cm/pixel]
-
 참조 : 결과는 [m]로 주어지며, GSD는[cm/pixel]을 고려합니다.
참조 : 결과는 [m]로 주어지며, GSD는[cm/pixel]을 고려합니다. - 식 (3)과 (5)를 결합
- t = x / v = ((imH * GSD) / 100) * (1 - overlap) / v (6)
-
 예시 : 두 이미지 사이의 시간을 계산하면 75%의 오버랩(오버랩 = 0.75)과 5의 GSD[cm/pixel]을 얻을 수 있습니다.
UAV/비행기의 속도는 30[km/h] = 8.33[m/s]입니다. 식 (6)을 사용하면, 이미지는 6초마다 촬영 되었을 것입니다.
예시 : 두 이미지 사이의 시간을 계산하면 75%의 오버랩(오버랩 = 0.75)과 5의 GSD[cm/pixel]을 얻을 수 있습니다.
UAV/비행기의 속도는 30[km/h] = 8.33[m/s]입니다. 식 (6)을 사용하면, 이미지는 6초마다 촬영 되었을 것입니다.- t = ((imH * GSD) / 100) * (1 - overlap) / v = ((4000 * 5 ) / 100) * (1 - 0.75) / 8.33 = 6 [s]
- 비행 방향을 향한 평행 센서 폭(길이 치수)에 따른 카메라 배향
- 카메라가 비행기/UAV에 위치해있을 경우, 비행 방향과 평행으로 있는 센서 폭(길이 치수)을 갖습니다.
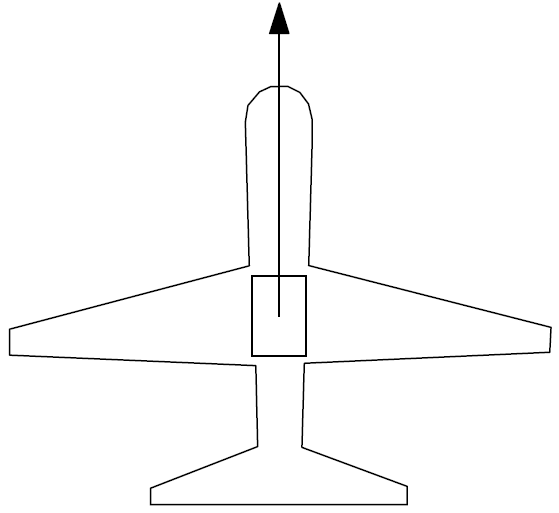
- [그림 3] 비행 방향에 평행으로 배치 된 센서 폭
- D = (imH * GSD) / 100 (70)
-
- 위치 :
- imH = 이미지 높이[Pixel]
- GSD = 원하는 GSD [cm/pixel]
- 식 (1)과 (7)을 (2)에 결합
- x = D - overlap * D
- x = D * (1 - overlap)
- x = x = ((imW * GSD) /100) * (1 - overlap) / v(9)
-
 참조 : 결과는 [m]로 주어지며, GSD는 [cm/pixel]을 고려합니다.
참조 : 결과는 [m]로 주어지며, GSD는 [cm/pixel]을 고려합니다. - 식(3)과 (8)을 결합
- t = x / v = ((imW * GSD) / 100) * (1 - overlap) / v (9)