
스텝 1. 프로젝트 시작 전 > 1. 이미지 수집 계획 설계하기 > a. 이미지 수집 계획 유형 선택
Pix4Dmapper 자동으로 수 천개의 이미지의 공통점을 찾는 것을 기반으로 하는 화상 처리 소프트웨어 입니다. 이미지에 있는 각각의 특징 포인트를 키포인트라고 부릅니다. 두 개의 다른 이미지에 키 포인트가 동일한 것으로 확인되면, 이 둘은 키 포인트가 일치 합니다. 정확하게 일치하는 키 포인트의 각 그룹은 하나의 3D 포인트를 생성합니다. 두 이미지 사이에 높은 오버랩이 존재할 경우, 공통 영역이 더 크고 키 포인트가 서로 일치될 수 있습니다. 키 포인트가 많을 경우, 보다 정확하게 3D 포인트가 계산될 수 있습니다. 따라서 기본 규칙은 이미지간의 높은 오버랩을 유지하는 것입니다.
이미지 수집 계획의 결과는 품질에 높은 영향을 미치므로 신중하게 설계하는 것이 중요합니다.
 중요 : 필드에 있는 동안 Pix4Dmapper는 빠른 확인 기능을 실행할 수 있습니다.
빠른 확인 기능은 데이터 세트가 잘 사용되고 있는 지의 지표로 사용할 수 있습니다.
중요 : 필드에 있는 동안 Pix4Dmapper는 빠른 확인 기능을 실행할 수 있습니다.
빠른 확인 기능은 데이터 세트가 잘 사용되고 있는 지의 지표로 사용할 수 있습니다.
- 빠른 확인 기능이 좋은 결과를 산출하지 않을 경우, 데이터 세트가 적절하지 않음을 의미하며 다시 이미지를 수집할 필요가 있습니다. 어떤 경우에는, 빠른 확인은 실패할 수 있으나 전체적인 프로세싱은 작동하며 이런 경우 보통 데이터 세트가 최적화 되지 않았음을 나타냅니다.
- 빠른 검사와 전체 프로세싱의 차이점에 대한 자세한 내용은 다음을 확인하세요:202558949
- 이상적인 이미지 수집 계획
- 이상적인 이미지 수집 계획은 재구성 될 지형/대상의 유형에 의존됩니다.
-
- • 일반적인 경우 : 재구성하기 어려운 숲, 눈, 호수, 농업 분야 및/또는 기타 지형을 포함하지 않는 프로젝트
- • 숲과 뻑뻑한 식물 : 숲 또는 식물이 빽빽하게 덮인 영역의 프로제트
- • 농업 분야의 평면 지형 : 농업 분야 같은 동종의 평면 지형
- • 건물 재건축 : 건물의 3D 모델링
- • 특수한 경우 : 눈, 모래, 수면(바다, 호수, 강 등)
- • 종주 지형 맵핑 : 직선 영여의 프로젝트(도로,하천 등)
- • 복수 비행 : 복수의 항공편을 사용하여 촬영한 이미지 프로젝트
- • 도시 제건(눈에 보이는 외관) : 도시 지역을 3D 모델링 하십시오.
- • 3D 인테리어 재구성 : 어떠한 물질 혹은 도시 지역, 건물, 조립, 구조 등
- • 혼합 재건: 내부 및/또는 외부 및/또는 공중 재건의 경우
- • 대형 수직 개체 재건 : 전송탑, 풍력 터빈 등의 3D 모델링
중요 :
해당 설명은 다른 이미지 수집 경로를 설명하고 있으며 제안 된 것보다 낮은 오버랩 빈도를 사용할 경우, 최상의 결과를 얻기 위해서는 권장하는 오버랩을 사용하십시오.
- 일반적인 경우
- 대부분의 경우에 대한 권장 오버랩은 최소 75%의 정면 오버랩(비행 방향에 대하여)이며 최소 60% 측면 오버랩(비행 트랙 사이)입니다. 정규 격자 패턴(그림 1)이미지를 확인 하는 것을 권장합니다. 카메라는 지형/대상의 가능한 일정 높이를 유지하여 원하는 GSD가 보장되어야 합니다.
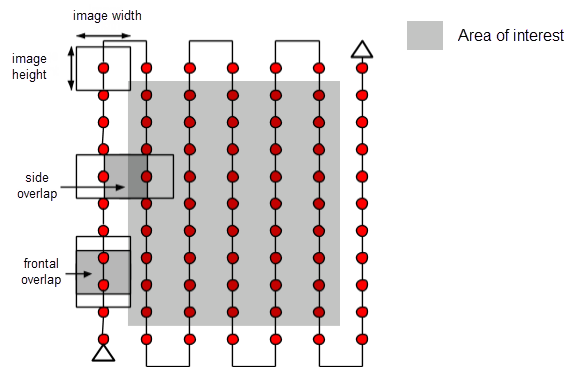
- (그림1) 이상적인 이미지 수집 계획 - 일반적인 경우
- 숲과 빽빽한 식물
- 나무와 빽빽한 식물은 보통 복잡한 형상(수천개의 나뭇가지와 나뭇잎)을 띄고 있어 오버랩핑 이미지들 사이가 매우 다릅니다. 따라서 이미지들간의 공통된 특징을 추출하는 것은 힘듭니다. 양호한 결과를 달성하기 위해, 다음과 같이 변경하여 일반적인 경우 섹션에서 설명된 것과 같이 그리드 이미지 수집게획을 사용하는 것이 좋습니다. :
-
- • 최소 85%의 정면 오버랩과 최소 70%의 측면 오버랩에서의 오버랩을 증가시키십시오.
- • 비행 높이 증가 : 높은 고도에서는 왜곡 현상이 줄어들며 (따라서 외관 문제의 원인을 낮춥니다.) 빽빽한 식물은 시각적으로 더 보기 좋습니다. 바꿔 말하자면, 고도가 높을 경우 이러한 영역의 오버랩 된 이미지 사이의 유사성을 식별하는 것이 용이합니다. 이미지의 픽셀 해상도 및 초점 거리와 함께 비행 높이는 이미지의 지상 샘플링 거리(공간 해상도)를 결정합니다. GSD가 10cm/Pixel보다 높을 경우 최상의 결과를 얻을 수 있습니다.
- 올바른 프로세싱 옵션을 통해 빽빽한 식물 영역의 결과를 향상시키는 방법에 대한 정보는 다음을 참조하십시오 : 202560159
- 농업 분야의 평면 지형
- 농업 분야 같은 동종의 지형이 평면일 경우, 이미지 들간의 공통의 특징을 추출하는 것이 힘듭니다. 양호한 결과를 달성하기 위해, 다음과 같이 변경하여 일반적인 경우 섹션에서 설명도니 것과 같이 그리드 이미지 수집 계획을 사용하는 것이 좋습니다.
-
- • 최소 85%의 정면 오버랩과 최소 70%의 측면 오버랩 에서의 오버랩을 증가시키십시오.
- • 시각적인 컨텐츠 결과를 향상시키기 위하여 낮게 비행하십시오.
- • 정확한 이미지의 위치 정보를 가지고 대체 프로세싱 모드로 프로젝트 형식을 설정합니다. 대체 프로세싱 모드에 대한 자세한 정보는 다음을 확인하십시오. : 202557759
- 건물 재건축
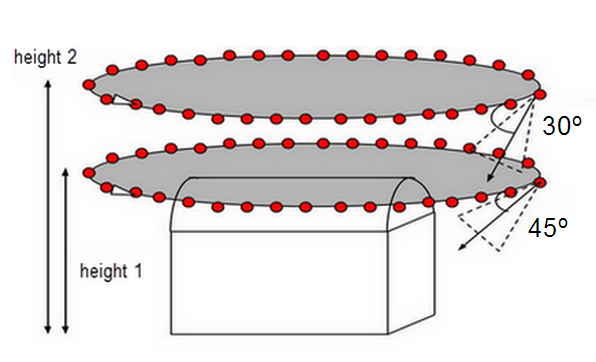
- 3D 건물을 재구성 하는 것은 특정 이미지 수집 계획이 필요합니다. (그림 2):
-
- • 처음 비행시 건물 주위를 45°카메라 각도를 도십시오.
- • 두 번째나 세 번째 비행시 비행 높이를 증가시키고 각 라운드마다 캄라 앵글을 감소시키십시오.
-
 참조 : 경사 이미지에 대한
자세한 내용은 다음을 참조하십시오. : 202559859
참조 : 경사 이미지에 대한
자세한 내용은 다음을 참조하십시오. : 202559859 - • 이미지를 촬영할 때 물체의 크기와 거리에 따라 충분히 오버랩 하기 위해 5~10°의 한 장의 이미지를 촬영하는 것을 권장합니다. 짧은 거리와 큰 개체는 그 이하 각도의 이미지를 필요로 합니다.
-
참조 :
- • 높이가 달라 서로 다른 공간 해상도를 이끌 두 비행 사이의 비행 높이가 2배 이상 증가되지 않아야 합니다. 더 자세한 정보는 다음을 참조하십시오. : 202558979
- • Pix4Dmapper는 건물의 경사 이미지를 위한 아주 좋은 클라우드 포인트를 생성합니다. 그러나 경사진 이미지는 정사투영이 생성 되지 않습니다.
-
 중요 : 현재, Pix4Dmapper는 (X,Y) 평면에 평행 정사투영
만을 생성합니다. 따라서, 외관의 모자이크를 생성하기 위해, 몇 가지 해결 방안을 적용 할 필요가 있습니다. 자세한 설명은 다음을 참조하십시오. : 202559889
중요 : 현재, Pix4Dmapper는 (X,Y) 평면에 평행 정사투영
만을 생성합니다. 따라서, 외관의 모자이크를 생성하기 위해, 몇 가지 해결 방안을 적용 할 필요가 있습니다. 자세한 설명은 다음을 참조하십시오. : 202559889 -
- (그림 2) 이상적인 이미지 수집 계획 - 건물
-
 참조 : 공중 나딜 및/또는 공중 기울기(45°와 80°사이)
및/또는 지상파 이미지 중 2~3 가지의 유형을 조합하는 것이 가능합니다.
참조 : 공중 나딜 및/또는 공중 기울기(45°와 80°사이)
및/또는 지상파 이미지 중 2~3 가지의 유형을 조합하는 것이 가능합니다.이미지의 각 세트는 스스로 충분히 오버랩 되어야 하며, 세트 사이끼리 GCPs 혹은 수동 타이 포인트를 필히 사용하는 것을 권장합니다.
- 특수한 경우
- 해당 섹션에서는 눈, 모래, 호수 등의 지형으로 맵핑하기 어려운 지형에 대한 몇 가지 힌트를 제시합니다.
-
눈 및 모래 눈과 모래가 크기 때문에 균일영역에 조금 비쥬얼 컨텐츠를 가지고 있습니다. - • 높은 오버랩 사용 : 최소 85%의 정면 오버랩과 최소 70%의 측면 오버랩에서의 오버랩을 증가시키십시오.
- • 각 이미지의 최대 대비를 얻음에 따라 노출 설정을 조절합니다.
수면 수면은 크게 균일한 영역으로 시각적으로 거의 다름이 없습니다. 수면에 햇빛이 반사되거나 파도가 치는 것은 시각적 매칭이 불가능 합니다. - • 바다는 재구성이 불가능 합니다.
- • 하천이나 호수 등의 물 표면을 재구성하기 위해 각 이미지는 지형을 가져야 합니다. 더 높이 나는 것은 땅의 기능을 더 많이 포함하는 데 도움을 줄 수 있습니다.
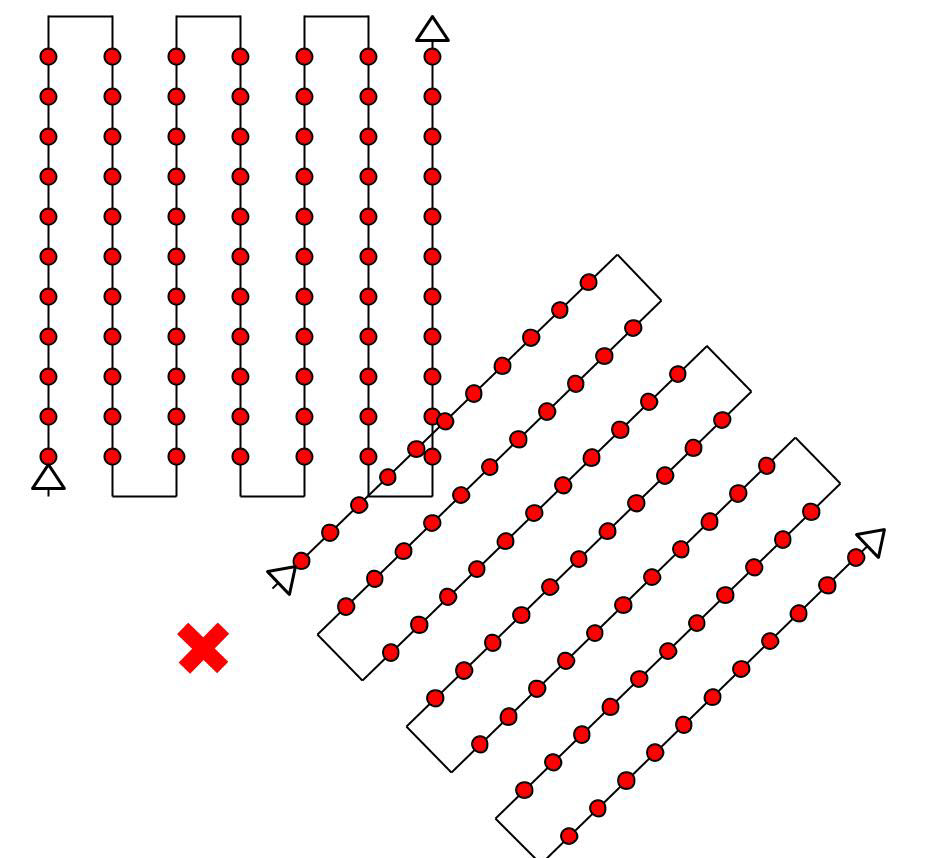
- 종주 지형 맵핑
- 철도, 도로 또는하천 맵핑은 최소한 두 개의 비행 라인이 필요합니다. (그림 3) GCPs가 요구되지는 않으나, 재건하는 데에 지리 및 오나전성을 개선하는 것에 도움이 되므로 사용하는 것을 권장합니다. 종주 지형 맵핑 GCP의 개수와 분포에 대한 자세한 내용은 다음을 참조하십시오. : 202559299
- 이중 트랙이 최소한 85%의 정면 오버랩을 사용하고 최소 60%의 측면 오버랩을 사용하는 것을 권장합니다.
- 최하점 이미지나 경사 이미지를 사용할 수 있습니다. (종주 지형의 두 트랙이 0°와 45°를 가리키는 사이) 평지의 경우는 최하점 이미지를 사용하는 것을 권장합니다.
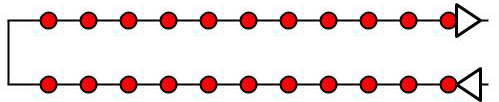
- (그림 3) 이중 트랙 이미지 수집 계획
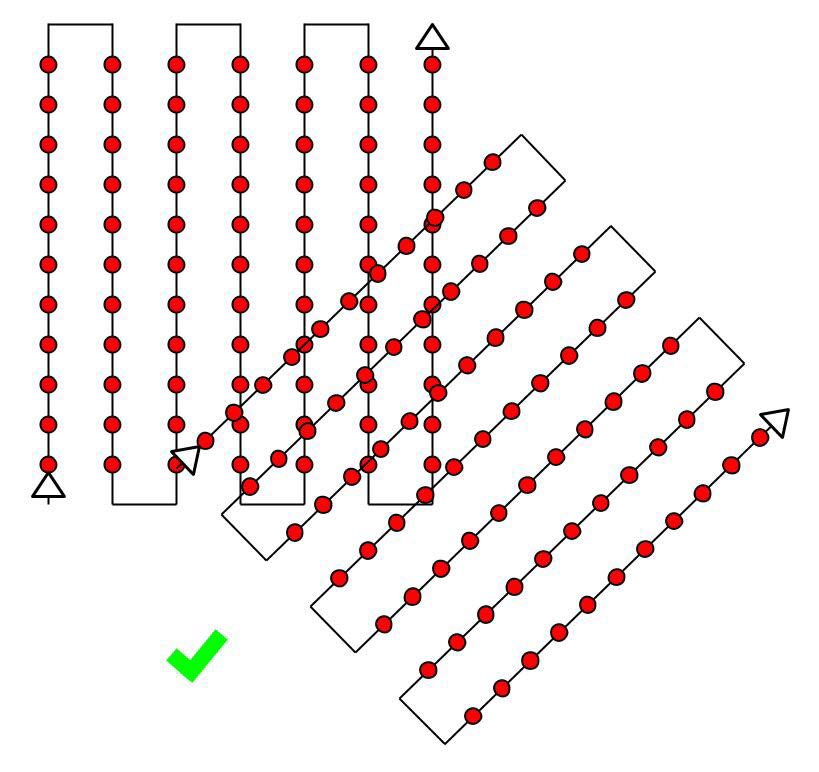
- 이중 트랙 이미지 수집 게획이 불가능 하다면, 하나의 트랙 이미지 수집 계획을 사용하는 경우도 있습니다.(그림 4) :
-
- • 오버랩은 충분히 높아야 합니다. : 정면 오버랩이 최소 85%
- • 그라운드 컨트롤 포인트(GCPs)는 지그재그의 비행 라인을 따라 정의 됩니다.

- (그림 4) 싱글 트랙 비행은 추천 하지 않습니다.
- 복수 비행
- Pix4Dmapper는 여러 항공편에서 촬영된 영상을 가공할 수 있습니다. 다른 이미지 수집 계획을 설계할 때 반드시 이것이 있는지 확인하십시오.
-
- • 각각의 계획은 이미지가 충분히 오버랩 되어야 합니다.
- • 두 개의 이미지 수집 계획 사이에 충분한 오버랩이 있어야 합니다. (그림 5, 그림 6)
- • 다른 계획은 동일한 조건 하에서 가능한 한 많이 촬영 해야 합니다. (태양의 방향, 날씨, 새로운 건물의 여부 등)
-
중요 : 높이가 달라 서로 다른 공간 해상도를 이끌 두 비행
사이의 비행 높이가 2배 이상 증가되지 않아야 합니다. 더 자세한 정보는 다음을 참조하십시오. : 202558979
여러 비행 데이터 세트를 처리할 수 있는 특별한 방법은, 다음의 지침을 따라 하십시오. :202558579
두 개의 항공편이 충분히 오버랩 됨
두 개의 항공편이 충분히 오버랩 됨
- (그림 5) 두 개의 항공편이 오버랩 됨
-
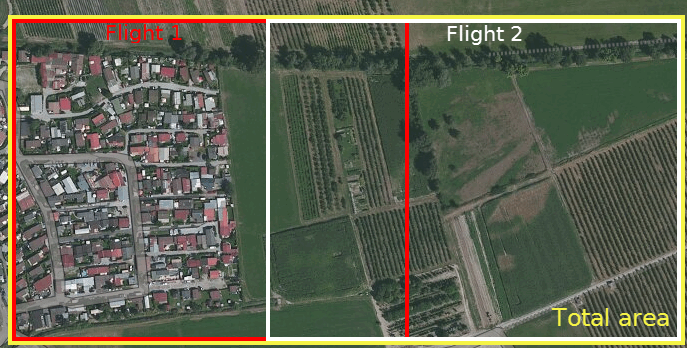
(그림 6) 두 개의 항공편의 이미지 수집 권장 방법
- 도시 재건(눈에 보이는 외관)
- 건물(동,서,남,북)의 모든 외관이 이미지에 보이도록 도시 지역의 3차원 재구성, 이중 그리드 이미지 수집 계획이 필요합니다. 오버랩은 일반적인 경우와 동일해야 합니다.
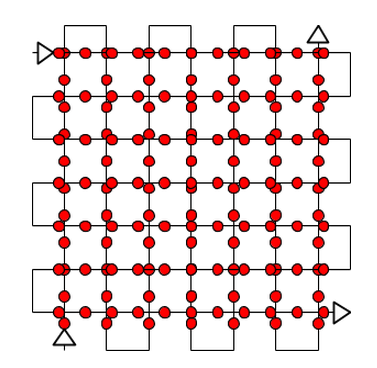
- (그림 7) 더블 그리드 이미지 수집 계획
- 외관이 보이도록, UAV/비행기는 각도(경사 이미지의 10°와 35°사이의 각도의 정의에 대한 자세한 내용은 다음의 각도 정의를 참조하십시오. 202559859 내에서 비행해야 하며 천저를 가리켜서는 안됩니다. 많은 세부 사항이 필요한 경우, 공중과 지상 이미지를 조합하십시오.
-
참조 : 공중 최하점 및/또는 공중 경사 및/또는 지상파 이미지를 조합 할 수있다 .
- 이미지의 각 세트는 스스로 충분히 오버랩 되어야 하며, 세트 사이끼리 GCPs 혹은 수동 타이 포인트를 필히 사용하는 것을 권장합니다. 자세한 내용은 다음을 참조하십시오. :202561599
- 3D 인테리어 재구성
- 내부 재건을 위해 지상파 이미지는 90%이상 오버랩 되어야 하며, 어떠한 갭도 없으며 어안렌즈를 사용하지 않고 이미지 사이를 지속적으로 오버랩 하는 것을 권장합니다.
- 이 모델을 조정하기 위해, 수동 타이 포인트를 사용하는 것을 강력히 권장합니다. 자세한 내용은 다음을 참조하십시오. :202970309
- 혼합 재건
- 공중 나딜 및/또는 공중 기울기(45°와 80°사이) 및/또는 내부 지상파 이미지 중 2~4자기의 유형을 조합하는 것이 가능합니다.
- 이미지의 각 세트는 스스로 충분히 오버랩 되어야 하며, 세트 사이끼리 GCPs 혹은 수동 타이 포인트를 필이 사용하는 것을 권장합니다. 자세한 내용은 다음을 참조하십시오. :202561599
- 대형 수직 개체 제건
- 전원 타워, 풍력 터빈 등과 같은 객체의 3D 복원은 특정 이미지 수집 계획이 필요합니다. (그림 8)
-
- • 구조물과 가깝게 비행하십시오.
- • 여러 높이에서 주변을 여러 번 도십시오.
- • 이미지는 높은 오버랩으로 촬영되어야 합니다. : 동일 높이에서 90% 이상 오버랩 되어야 하며 다른 높이에서 60% 이상 오버랩 되어야 합니다.
- • 최적의 카메라 각도는 45°입니다. 지상을 가리키고 이미지를 포함하는 경우 매칭하기 쉬우며 더 나은 결과를 가져옵니다.
- • 이미지는 최대한 포커싱을 맞춰야 합니다. (주 피사체와 배경 모두 초점이 맞아야 합니다.)
- • 이미지의 위치 정보를 갖는 것이 좋습니다. 이미지 위치 정보에 대한 자세한 정보는 다음을 참조하십시오. :202557499
-
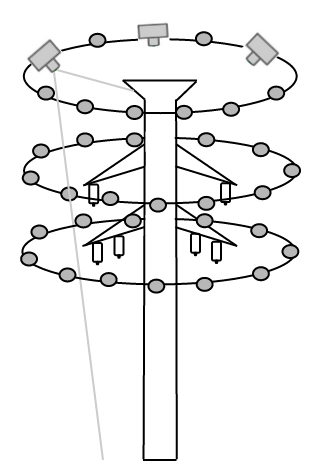
전송탑
-
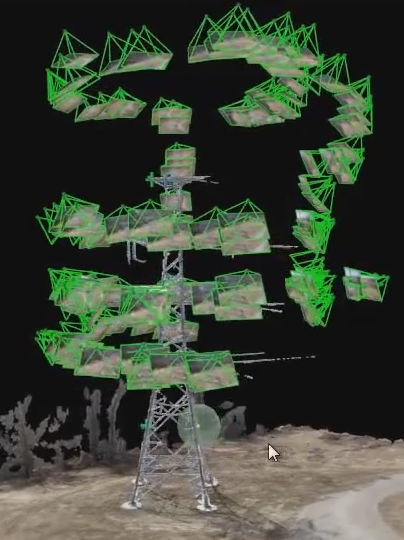
전송탑은 레이클라우드에 재건
- (그림 8) 이미지 수집 게획
-
 예시 : 송전탑을 매핑 및 검사 :비디오보기
예시 : 송전탑을 매핑 및 검사 :비디오보기